Pedestrian Intention’s Prediction: Another step towards the autonomous driving experience
Who has not dreamt of being able to get from place to place and avoid annoying commutes? Picture our cars as places where we can relax or talk, and not have to pay attention to the road. Most importantly, avoid the daily time waste of a routine trip to work.
Today’s technology is taking giant strides and at great speeds, every year vehicles are one step closer to autonomous driving. Six students saw the opportunity to contribute to this ideal and together with Volvo Cars ventured into the world of autonomous vehicle technology.
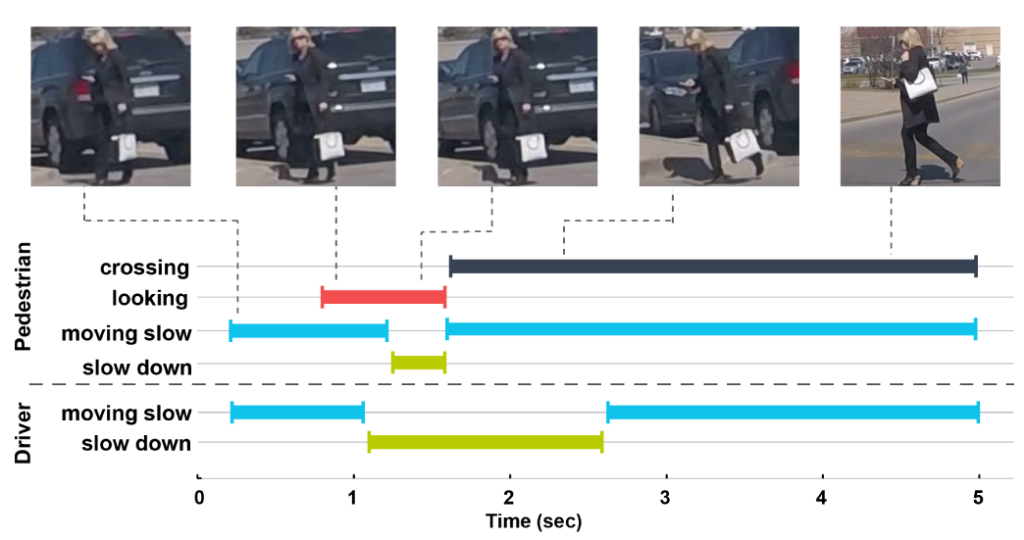
The novel project focused on improving a vehicle’s ability to understand the intention of pedestrians to cross the street or not. More specifically, they utilized object detection, tracking, skeletal features, and a spatio-temporal densenet to classify intention. How exactly did they put the architecture together? Click here to find out!
Project by: Francesco Piccoli, Matthew Tang, Rajarathnam Balakrishnan, Moraldeepsingh Sachdeo, Carlos Nunez, Maria Jesus Perez